自動運転システムとは?仕組みをわかりやすく簡単に解説(自動運転車、制御、センサー、AI)
自動運転車の仕組み
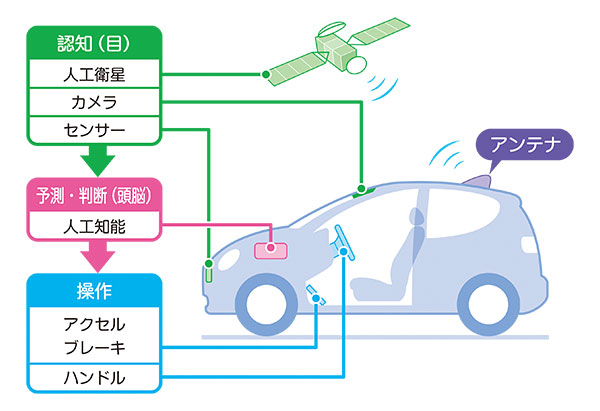
自動運転とは、カメラやセンサー、人工衛星の位置情報システムなどにより、周囲の状況を「認知」し、人工知能AIが、「予測」および「判断」して、ハンドルやアクセル制御などの「操作」をするものです。
運転者に代わって、制御プログラムが行って、「自動運転システム」と呼ばれます。
自動運転の四つの機能
認知
赤外線レーザーセンサーやミリ波レーダーセンサー、車載カメラなどを用いて、周りの車両との車間距離や周囲の歩行者の位置を把握します。
GPS(車両の位置を認識する機能)やITSシステム(交通情報を受発信する機能)を活用して、道路の交通情報や気象情報などのデータを収集します。
予測
例えば、カメラの被写体が、何かを判断したり、どのような動きをしているかなどを分析します。
GPSやITSシステムの情報を基に、最適な走行ルート・走行モードの判断材料にします。
判断
人工知能AIを駆使して、安全に目的地へ到達できるように判断します。
人工知能AIは、学習機能を備えているので、走れば走るほど、判断精度が高まり、正確な判断ができるようになります。
操作
人工知能AIが、安全性を考慮して、アクセル・ブレーキやハンドルを操作します。
自動運転を構成する10の要素技術

1.AI
自動運転の中枢を司る人工知能AIで、ディープランニング(深層学習)をして、高性能になっていきます。
いずれの選択肢も何らかの犠牲を伴う場合、人工知能AIがどのような判断を下すかという、トロッコ問題(トロリー問題)にも注目が集まっています。
2.認識
カメラやLiDAR(ライダー)に何が映っているかを判断する技術で、「パーセプション(perception)」と呼ばれます。
3.位置特定
GPSやQZSS(準天頂衛星システム)などの衛星測位システムを使ったり、高精度3次元地図上のデータと車載センサーに映し出されたデータを照合したり、位置の特定と地図作成を同時に行うSLAM、走行するルートに敷設した磁気マーカーを読み取る技術などを用いたり、様々な方法で、自車両の位置を導き出す技術で、「ローカライゼーション(localization)」と呼ばれます。
4.予測
見通しの悪い交差点において歩行者や自転車の飛び出しに備えて速度を落としたり、天気予報をもとに運行計画を立てたりする技術で、「プレディクション(prediction)」と呼ばれます。
5.通信
車車間通信(V2V)で自車の挙動や接近を周囲の車両に伝達したり、交差点における路車間通信(V2I)で信号情報や周辺の歩行者情報を受信したり、道路工事や事故、落下物の情報、走行レーンごとの渋滞情報などを適時受信したりする技術で、クラウドを含む管理サーバーなどと常時通信しながら走行します。
6.プランニング
目的地までのルート設定やルート最適化をする技術です。
7.サイバーセキュリティ
サイバー攻撃による乗っ取りなどを防ぐ技術です。
2019年に、独ダイムラーとBMWが展開するカーシェアサービス「Share Now」の車両が米国でハッキングされ、100台以上が盗難された事件も発生しています。
8.HMI
機械と人が情報や意思をやり取りするHMI(ヒューマンマシンインターフェース)技術です。自動運転のタクシーが、歩行者からの乗車意思を伝達・確認することなどです。
9.モニタリング
ドライバーモニタリング機能は、手動運転時におけるドライバーの挙動を車内カメラで監視して、頭の傾きやまばたきの回数、目線などを常時観測し、よそ見や居眠り運転などの危険を未然に防止する技術です。
自動運転レベル3の解禁により、搭載が義務付けられました。自動運転レベル4以降でも、重要になってきます。
10.データ処理
膨大なデータを蓄積・高速処理する技術です。
参考サイト
姉妹サイト
自動運転車とは 自動運転車を英語で 運転支援システムとの違い メリット/デメリット 事故責任と法律 レベル0,1,2,3,4,5の定義 自動運転システムの仕組み システムランキング 自動運転車の保険 事故の事例 倫理的問題 社会経済的影響 レベル3,4市販車 レベル2の軽自動車 自動運転車レベル別車種一覧 レベル2の車種一覧 レベル3の車種一覧 レベル4の車種一覧 レベル5の車種一覧 自動運転車レベル別車種一覧 自動運転タクシー 特許ランキング免責事項・著作権表示
情報が古かったり、間違っていることなどによる損害の責任は負いかねますので、ご了承ください。
Copyright (C) SUZ45. All Rights Reserved.